[연구 발표] 부산대학교 X 메디아나랑하: AI 기반 드론 자력탐사 비행 궤적 자동 분류 기술 개발
안녕하세요, 메디아나랑하입니다.
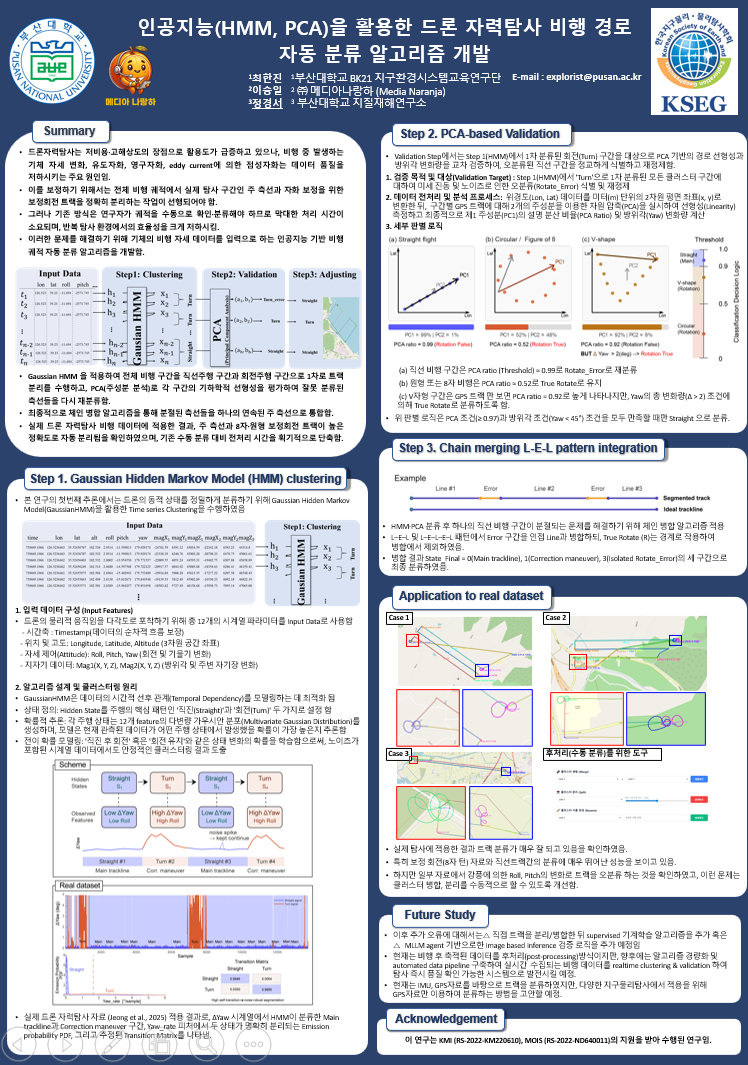
최근 드론 자력탐사는 저비용·고해상도의 장점으로 활용도가 급증하고 있으나, 데이터 품질을 저하시키는 다양한 요인들로 인해 정밀한 데이터 처리가 요구되고 있습니다. 특히 비행 중 발생하는 기체 자세 변화, 유도자화, 영구자화, 그리고 eddy current에 의한 점성자화는 데이터의 신뢰성을 떨어뜨리는 주요 원인입니다.
이러한 오차를 보정하기 위해서는 전체 비행 궤적에서 실제 탐사 구간(Main Trackline)과 자화 보정을 위한 보정회전 트랙(Correction maneuvers)을 정확히 분리하는 작업이 필수적입니다. 하지만 기존의 수동 분류 방식은 막대한 시간과 비용이 소요되어 반복 탐사 환경에서의 효율성을 크게 저하시켰습니다.
메디아나랑하는 이러한 문제를 해결하기 위해 부산대학교와의 공동 연구를 통해 기체의 비행 자세 데이터를 입력으로 하는 인공지능 기반 비행 궤적 자동 분류 알고리즘을 성공적으로 개발하였습니다.
하이브리드 자동 분류 알고리즘의 구성
본 연구에서 제안된 알고리즘은 복합적인 비행 패턴을 정밀하게 구분하기 위해 다단계 추론 과정을 거칩니다.
1. Gaussian Hidden Markov Model (GaussianHMM)
전체 비행 구간을 직선주행(Straight)과 회전주행(Turn) 구간으로 1차 분리합니다. HMM은 데이터의 시간적 선후 관계를 확률적으로 모델링하여 노이즈가 포함된 시계열 데이터에서도 안정적인 클러스터링 결과를 도출합니다.
2. PCA(주성분 분석) 기반 재분류
1차 분류된 각 구간의 기하학적 선형성을 평가합니다. 직선 구간으로 분류되었으나 선형성이 낮은 경우 등을 다시 검토하여 분류 정확도를 극대화합니다.
3. 체인 병합(Chain Merging) 알고리즘
분절된 여러 측선들을 하나의 연속된 주 측선으로 통합하여 최종적인 탐사 경로를 완성합니다.
알고리즘 설계 및 시계열 클러스터링 원리
드론의 동적 상태를 다각도로 포착하기 위해 총 12개의 시계열 파라미터를 입력 데이터로 사용합니다.
- 위치 및 고도: Longitude, Latitude, Altitude (3차원 공간 좌표)
- 자세 제어 (Attitude): Roll, Pitch, Yaw (회전 및 기울기 변화)
- 지자기 데이터: Mag1(X, Y, Z), Mag2(X, Y, Z) (방위각 및 주변 자기장 변화)
- 시간축: Timestamp (데이터의 순차적 흐름 보장)
GaussianHMM은 각 주행 상태가 12개 Feature의 다변량 가우시안 분포(Multivariate Gaussian Distribution)를 생성한다고 가정합니다. 모델은 '직진 후 회전' 혹은 '회전 유지'와 같은 전이 확률(Transition Probability)을 학습함으로써, 실제 관측된 데이터가 어떤 상태에서 발생했을 확률(Emission Probability)이 가장 높은지 실시간으로 추론합니다.
연구 결과 및 기대 효과 (Jeong et al., 2025)
실제 드론 자력탐사 비행 데이터에 적용한 결과, 주 측선과 8자·원형 보정회전 트랙이 매우 높은 정확도로 자동 분리됨을 확인하였습니다. 특히 ΔYaw 시계열과 Yaw_rate 피처에서 두 상태가 명확히 분리되는 확률 밀도 함수(PDF)를 통해 모델의 유효성을 검증하였습니다.
[비행 데이터 분석 알고리즘 성과]
99%
분류 정확도
-90%
전처리 소요 시간
Auto
데이터 품질 검수
본 기술의 도입으로 기존 수동 분류 대비 전처리 시간을 획기적으로 단축하였으며, 데이터 품질 관리의 객관성을 확보하였습니다. 메디아나랑하는 앞으로도 AI 기술을 활용하여 지질 탐사 및 특수 목적 드론 운영의 지능화를 선도해 나가겠습니다.

[그림] 드론 자력탐사 시스템 및 비행 경로 시각화 (개념도)